




Единый подход к мерам неопределенности в статистических задачах принятия решений
В последнее время развитие и широкое применение беспилотных летательных аппаратов (БПЛА) формирует новые возможности для решения самых разных задач. Особую значимость приобретает проблема обеспечения безопасности, особенно в зоне критически важных охраняемых объектов или в местах со сложной воздушной, в том числе - орнитологической обстановкой (аэропорты, объекты ветроэнергетики). В связи с этим возрастает актуальность обнаружения малоразмерных воздушных целей, распознавания их типа и степени опасности. В статье сформулированы предложения по формированию алфавита признаков распознавания с позиций единого подхода к мерам неопределенности в статистических задачах принятия решений.

При разработке современных радиолокационных систем внимание уделяется не только обнаружению, измерению координат воздушных целей, но и распознаванию летательных аппаратов заданного алфавита классов.
Если проблема распознавания классов «традиционных» воздушных объектов – самолетов, вертолетов, баллистических и крылатых ракет в основном решена, то в распознавании беспилотных летательных аппаратов (БПЛА) остаются вопросы.
Применение БПЛА в обычных, «мирных» сферах деятельности человека трудно переоценить. Беспилотные аппараты широко используются для наблюдения за состоянием сельскохозяйственных угодий, за дорожной обстановкой, для прогнозирования чрезвычайных ситуаций и постоянного мониторинга потенциально опасных районов и т. д. Ситуации, когда БПЛА «свой» и под контролем, интереса для задач распознавания не представляют и рассматриваться не будут.
В настоящее время – решения задач СВО, борьба с БПЛА – важнейшая задача для выживания личного состава и техники непосредственно на линии боевого соприкосновения, ближнем тылу, позиционных районах войск. Эту задачу решают элементы системы ПВО отделения, взвода, роты и далее по иерархической лестнице. В настоящей статье вопросы особенности распознавания БПЛА в интересах системы войсковой ПВО также не рассматриваются.
Анализ боевого применения БПЛА, особенно в последнее время, показывает, что особую значимость приобретает проблема обеспечения безопасности критически важных инфраструктурных объектов (аэропорты, НПЗ, газовые хранилища и т.п). Перечисленные объекты непосредственно не относятся к элементам боевого или технического обеспечения войск, но их «противодроновая» защита требует непрерывной оценки воздушной обстановки.
Таким образом, возрастает актуальность обнаружения, особенно, малоразмерных воздушных целей, распознавания их типа и степени опасности.
Цель статьи, по замыслу авторов, – исследование возможности использования единого подхода в оценке информативности параметров сигналов
в задачах распознавания классов БПЛА.
Для решения поставленной задачи рассмотрим некоторые понятия.
1. Функция неопределенности для оценки информативности сигналов
Обозначим A класс функций f(x), заданных на интервале x ∈ (0;1), которые удовлетворяют следующим условиям:
– функция f(x) – непрерывная, ограничена в интервале x ∈ (0;1) и имеет производную во всех внутренних точках этого интервала;
– функция f(x) неотрицательная при всех x ∈ (0;1).
Будем называть функцию f(x), принадлежащую множеству A - функцией неопределенности для оценки информативности сигналов.
2. Обобщенная мера неопределенности для оценки информативности сигналов
Предположим, что существует монотонная, на интервале x ∈ (0;1) функция:
 , E(y) = (0; ∞). (1)
, E(y) = (0; ∞). (1)
Тогда, обобщенной мерой неопределенности H(x), x ∈ (0;1) будем называть монотонно убывающую на интервале x ∈ (0;1) функцию, определяемую из равенства
H(x) = φ(y), y ∈ (0; ∞), (2)
где y=f(x)x, x ∈ (0;1).
Функции H(x), в зависимости от выбора φ(y) и f(x), формируют различные меры неопределенности.
Физический смысл функций мер неопределенности определим следующим
образом – убывание функции на интервале x ∈ (0;1) означает уменьшение неопределенности от Hmax(x), в окрестностях x = 0, до Hmin(x), в окрестностях x = 1.
Предлагаемый класс функций A содержит в себе большое число конкретных примеров функций f(x), являющихся функциями неопределенности. В теории различения сигналов целесообразно выделить различные типы функций f(x), которые бы обеспечивали построение необходимых мер неопределенности [1 с.30].
В качестве основных типов функций неопределенности чаще всего используют квадратичную и экспоненциальную функции, подбирая коэффициенты в стандартной форме записи. Правильно подобранные коэффициенты обеспечивают принадлежность рассматриваемых функций к классу функций неопределенности.
Квадратичная функция
f(x) = ax2 + bx + c, (3)
где a, b. c – постоянные коэффициенты, x ∈ (0;1), будет принадлежать классу A, если ее коэффициенты а=-1, в=1, с=0.
Тогда f(x) = -x2+x, а мера неопределенности, соответственно, будет определяться выражением H(x) = 1 - x, x ∈ (0;1).
Экспоненциальная функция вида
 (4)
(4)
будет функцией неопределенности, если коэффициент α ≤ 0.
Тогда f(x) ϵ A и обобщенная мера неопределенности будет равна
 x ∈ (0;1). (5)
x ∈ (0;1). (5)
Докажем это утверждение.
Пусть 
 m∈ N, следовательно
m∈ N, следовательно


Доказательство закончено.
3. Примеры построения модифицированных мер неопределенности
На основании рассмотренных в п.2 квадратичной и экспоненциальной функций неопределенности рассмотрим построение модифицированных мер неопределённости Котельникова, Шеннона, Кульбака, Байеса.
Пусть:
φ(y)=ln y (6)
Тогда квадратичная функция неопределенности (3)
f(x) = ax2 + bx + c, x ∈ (0;1)
формирует, при определенных условиях, налагаемых на коэффициенты а ,в ,с меры неопределенности Котельникова, Шеннона, Кульбака.
– положим в (3) а=0, с=0, в=e1-γ , 0 ≤ γ ≤ 1, тогда (1) принимает вид
, 0 ≤ γ ≤ 1, тогда (1) принимает вид
f(x)=х , x ∈ (0;1). (7)
, x ∈ (0;1). (7)
Отметим, что в выражении (6) независимая переменная γ - непрерывная случайная величина, численно равная априорной вероятности появления сигнала класса Аk и равносильна по смыслу независимой переменной х:
γ = max {, …,
…,  }, γ ∈ (0;1), (8)
}, γ ∈ (0;1), (8)
где p – вероятность появления сигнала класса Аk, k = {1,…,N}.
Тогда f(x) ∈ A и обобщенная мера неопределенности будет равна
 γ ∈ (0;1). (9)
γ ∈ (0;1). (9)
Меру неопределенности (8) будем называть модифицированной мерой неопределенности Котельникова.
– положим в (3) а=0, в=0, с = 1.
При таких условиях f(x) = 1, x ∈ (0;1) принадлежит классу функций A и является функцией неопределенности. Следовательно, в соответствии с выражениями (2) и (6):
H(x) = φ(y) = ln (1/х) (10)
Меру неопределенности (10) будем называть модифицированной мерой неопределенности Шеннона.
– положим в (3) а=0, в=-1, с = 1.
Тогда, функцию неопределенности f(x) = ax2 + bx + c, x ∈ (0;1) можем записать в виде:
 (11)
(11)
Меру неопределенности, которую порождает функция (11) можем записать в виде

Для того, чтобы мера неопределенности (12) удовлетворяла условиям (2) на интервале x∈ (0;1) необходимо и достаточно, чтобы функция H(x) была непрерывная на интервале (0; 1) и имела производную f'(x) ≤ 0 для всех x ∈ (0; 1). После несложных преобразований получим выражение:
 , ≤ 0, при всех x ∈ 0;1
, ≤ 0, при всех x ∈ 0;1 (13)
(13)
Легко заметить, что при  неравенство (13) всегда выполняется и, следовательно выражение (12) будем называть модифицированной мерой неопределенности Кульбака.
неравенство (13) всегда выполняется и, следовательно выражение (12) будем называть модифицированной мерой неопределенности Кульбака.
Рассмотрим экспоненциальную функцию неопределенности (4):
 , x ∈ (0;1)
, x ∈ (0;1)
при выполнении условий α=1, β=-1 принимает вид:
 , x ∈ (0;1).
, x ∈ (0;1).
В этом случае, мера неопределенности H(x)примет вид:
H(x) = φ(y) = 1-х, x ∈ (0;1) (14)
1-х, x ∈ (0;1) (14)
Выражение (14) будем называть модифицированной мерой неопределенности Байеса.
Полученные модифицированные меры неопределённости Котельникова, Шеннона, Кульбака, Байеса будем рассматривать как математический аппарат для оценки информативности того или иного признака распознавания [2 с.321].
Для наглядности, полученные результаты сведены в таблицу 1.
Таблица 1
Модифицированные меры неопределенности
|
k |
|
Наименование меры неопределенности |
||
|
условия |
fk(x) |
Hk(x) |
||
|
f(x) = ax2 + bx + c |
||||
|
1 |
а=0, с=0, в=e1-γ |
хe1-γ |
1-γ |
Котельникова (H1(x)) |
|
2 |
а=0, в=0, с = 1 |
1 |
ln (1/х) |
Шеннона (H2(x)) |
|
3 |
а=0, в=-1, с = 1. |
|
|
Кульбака (H3(x)) |
|
|
||||
|
4 |
α=1, β=-1 |
|
1-х |
Байеса (H4(x)) |





4 Анализ графиков функций и мер неопределенности
На рисунке 1 представлены графики функций и мер неопределенности fk(x)и Hk(x) 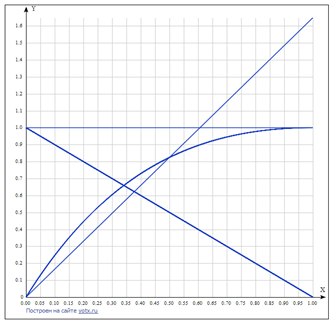
а) графики функций fk(x)
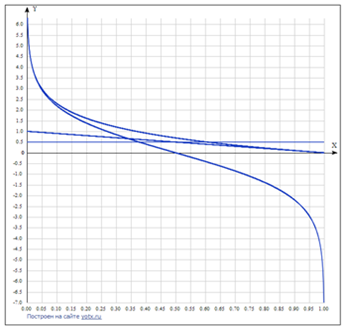
б) графики функций Hk(x)
Рисунок 1. Графики функций и мер неопределенности fk(x)и Hk(x)
Анализ графиков позволяет сделать вывод о том, существует возможность упорядочить значения мер неопределенности Hk(x). Графики функций неопределенности fk(x) и мер неопределенности Hk(x) обладают одинаковыми тенденциями изменения своей очередности и, следовательно, по одинаковой схеме происходит смещение функций и мер неопределенности.
Очевидно, что процесс получения информации должен вести к уменьшению или полному снятию неопределенности о том или ином классе сигналов. Поэтому целесообразно определить количество информации как разность между априорной неопределенностью и неопределённостью, которую удастся снять при обработке априорной информации [3 с.76].
Задачу выбора той или иной меры количества информации можно свести к задаче выбора меры неопределенности Hk(x), которая в свою очередь определяется выбором функции неопределенности fk(x).
Следовательно, используя представления о функциях неопределенности и порождаемых ими мерах неопределенности можем построить меры количества информации для принятия решения в пользу того или иного класса сигналов.
- Косенко Г.Г. «Критерии информативности при различении сигналов». М.: «Радио и связь», 1982.
- Вальд А. «Последовательный анализ»: Пер. с англ./Под ред. Б.А. Севастьянова – М.: Физматгиз, 1960.
- Вентцель Е.С., Овчаров Л.А. «Теория вероятностей и ее инженерные приложения».– М.: «Наука», 1988.
Научные высказывания #99







 © 2019-2023 Научные высказывания
© 2019-2023 Научные высказывания