Выполнение заданий в режиме обучения Dobot Magician для формирования алгоритмического мышления у учащихся 7 классов
Рассмотрен режим обучения при работе с манипулятором Dobot Magician. Приведены несколько заданий для учащихся 7 класса. Даны рекомендации по работе в режиме обучения.
В настоящее время все больше отраслей, в которых для выполнения определенных видов работ применяют роботизированные системы. Это привело к тому, что в российских вузах появились специальности на которых готовят специалистов, разрабатывающих системы управления работой роботов, следящие за корректностью их эксплуатации и ремонта.
На российском рынке учебного оборудования для школ в 2018 году появился робот-манипулятор Dobot Magician, предназначенный для обучения детей управлением и обслуживанием роботизированными системами. Dobot Magician является аналогом манипуляторов, которые все более широко используются в различных отраслях производства. Роботизированная рука позволяет решать целый класс задач с учащимися разного возраста.
Задания учащиеся могут выполнять в двух режимах работы манипулятора:
- режим обучения - основной режим, рекомендованный для учащихся 5-7 классов, а также для учащихся, не имеющих навыков программирования;
- режим программирования в Scratch – для продвинутых учащихся, имеющих навыки программирования.
Также возможно совместное применение этих режимов при обучении.
Однако методических материалов по использованию роботизированной руки в российском сегменте интернета практически нет, особенно для учащихся 5-7 классов, которые не имеют знаний по геометрии, физике и в большинстве не знакомы с программированием.
Для решения данной проблемы совместно с обучающимся на программе дополнительного образования «Прикладная робототехника» был разработан ряд заданий, которые можно использовать для организации учебного процесса у учащихся 5-7 класса, которые начинают осваивать курс, а также для тренировки и поиска новых рациональных решений с учащимися, имеющими опыт в работе с манипулятором.
Задания разработаны для режима обучения.
Режим обучения представляет собой последовательное совершение с роботом действий, которые при запуске программы он должен полностью повторить. Для этого учащийся задает координаты точек, в которых робот должен будет побывать, перемещая стрелу робота последовательно от точки к точке. При включении робота все его двигатели блокируются, поэтому для перемещения нужно нажать и удерживать во время всего перемещения кнопку с изображением замка, расположенную на стреле робота. Как только кнопка отпущена, робот фиксирует и заносит в таблицу координаты точки, в которой отпустили кнопку.
Таблица состоит из 8 колонок.
Координаты точек x, y и z записываются в колонки 3, 4 и 5 соответственно.
Колонка 1 определяет тип движения робота: JUMP – П-образная траектория, самая безопасная на начальных этапах обучения, MOVL – перемещение между двумя точками по прямой, MOVJ – перемещение между двумя точками с минимальным вращением всех двигателей, ARC POINT – перемещение по 3-м точкам по дуге окружности.
Колонка 2 Имя необходима для разделения строчек таблицы на отдельные блоки выполнения работы.
Колонка 6 определяет угол поворота насадки при работе с вакуумным и пневматическим захватами.
Колонка 7 определяет задержку по времени в секундах перед выполнением шага.
Колонка 8 определяет режим работы насадки.
Данный режим не позволяет учащимся получить навыки программирования, т.к. робот выполняет команды только построчно и последовательно. Повторение того или иного действия происходит путем копирования и добавления соответствующих строк, что приводит к увеличению объема таблицы.
С другой стороны, данный режим более гибкий по сравнению с режимом программирования, т.к. позволяет по ходу выполнения программы корректировать отдельные ее ячейки. Кроме того, в данном режиме предусмотрена пошаговая имитация выделенной строчки таблицы, что позволяет учащимся без запуска программы увидеть большинство недостатков и неточностей, допущенных при составлении таблицы.
На более высоком уровне учащиеся в режиме обучения осваивают навыки алгоритмизации при помощи математических знаний сами рассчитывают последовательно точки, в которые робот должен прийти. При этом движения и перемещения робота становятся более точными.
Ниже представлен ряд заданий и пример их реализации, подготовленный учащимся 7 класса.
Для всех разработанных заданий действуют ограничения:
- Кубик не должен попадать за пределы очерченной зоны.
- Нельзя касаться кубиков руками или подталкивать их другими предметами.
Техника безопасности:
- При разрушении преграды или конструкции из кубиков необходимо прервать программу кнопкой аварийной остановки и начать отладку программы пошагово.
- Не допускать упирания стрелы робота в стол или в нижестоящие кубики, в этом случае возможна дальнейшая некорректная работа робота.
Задание 1. Зазеркалье. На листе бумаги разлиновываются места начального и конечного положения кубиков. Кубики устанавливаются, как показано на рисунке 1 слева или справа. Перед кубиками устанавливается преграда (полоса на рисунке). Задача учащихся переместить кубики слева направо по цветам, как показано на рисунке, или наоборот.
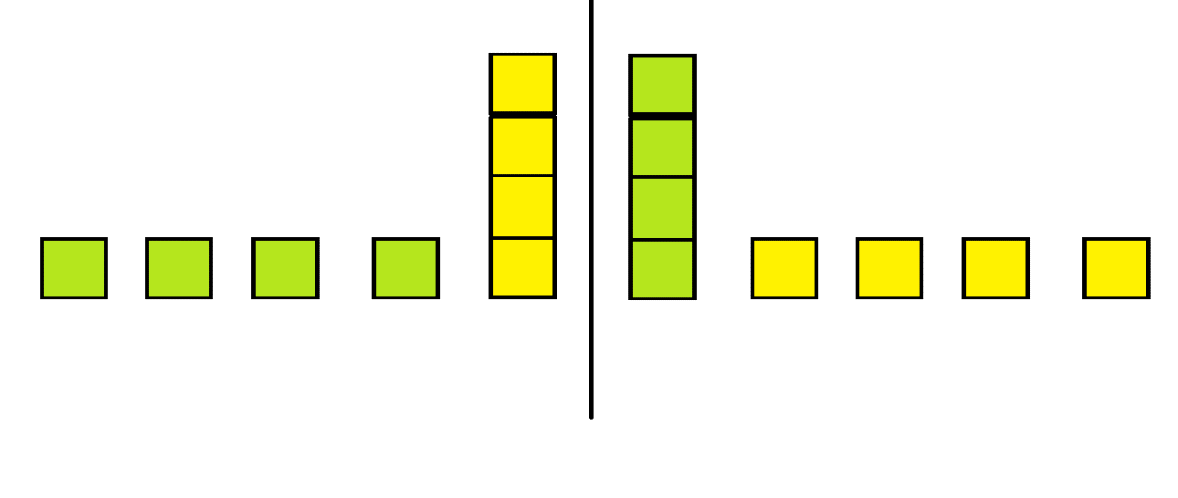
Рис.1 Перестановка кубиков через барьер, вид сбоку.
При выполнении задания необходимо учесть, что размер квадрата, куда устанавливается кубик должен быть чуть больше размеров кубика из-за неточностей перемещений стрелы робота. Лист бумаги, на который нанесена линовка, необходимо закрепить во избежание падения кубиков или перемещения листа по столу.
На рисунке 2 представлен образец выполнения данной задачи учащимся. Особенность данного выполнения в том, что кубики в составляемой после перемещения башне устанавливаются с поворотом 450 через один.
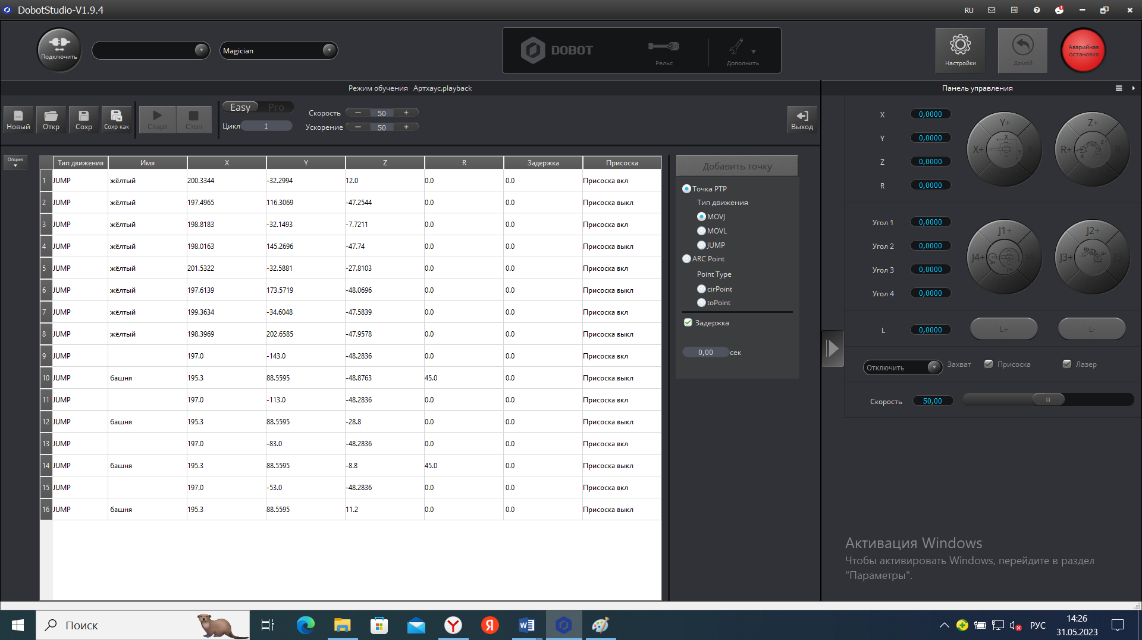
Рис.2 Таблица для выполнения задания «Зазеркалье».
Задание 2. Лабиринт. На столе в пределах рабочей зоны манипулятора из подручных средств собирается лабиринт. Задача учащихся вывести кубик из лабиринта за наименьшее время. Возможно выполнение обратной задачи: провести кубик в самую дальнюю точку лабиринта.
При выполнении задания необходимо учесть, что стенки лабиринта не должны быть жестко закреплены, чтобы при касании их кубиком или роботом это было заметно. Проходы лабиринта необходимо сделать на 1 – 2 мм больше размеров кубика.
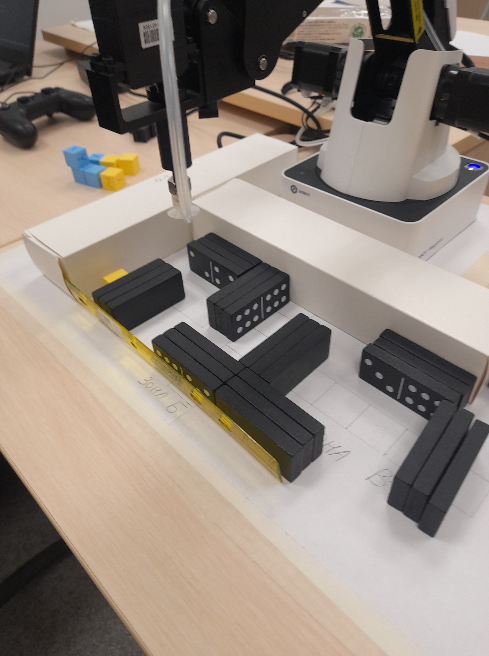
Рис. 3 Лабиринт
На рисунке 4 представлен образец выполнения данной задачи учащимся.
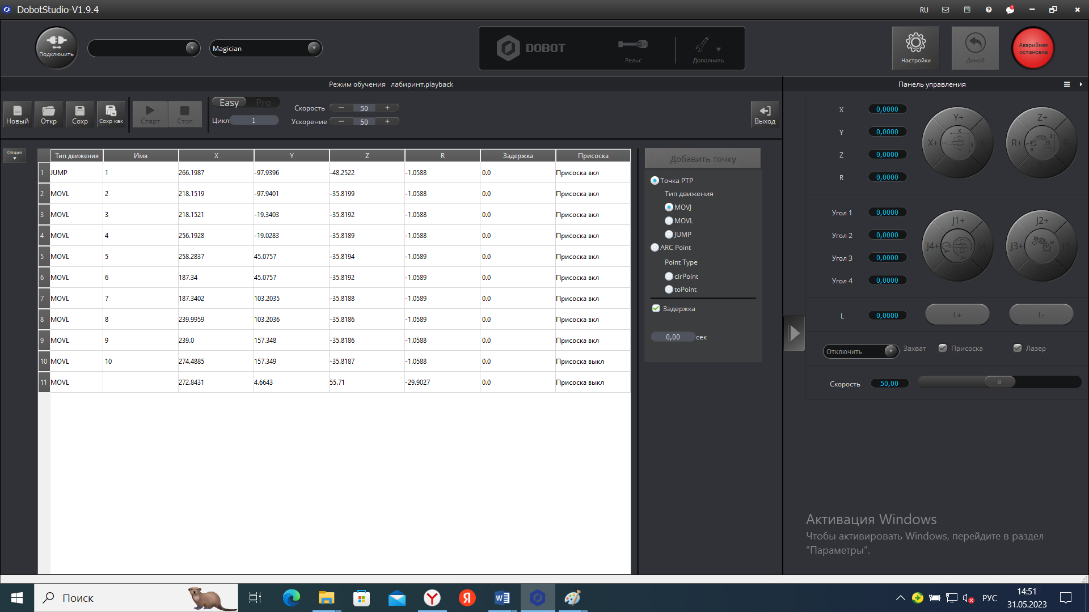
Рис. 4 Таблица для выполнения задания «Лабиринт».
Задание 3. Винтовая лестница. На столе в пределах рабочей зоны манипулятора выкладывается одна или несколько стопок из домино. Задача учащихся установить все костяшки одна на другую с поворотом 10 или 20 градусов относительно предыдущей, получив устойчивую конструкцию.
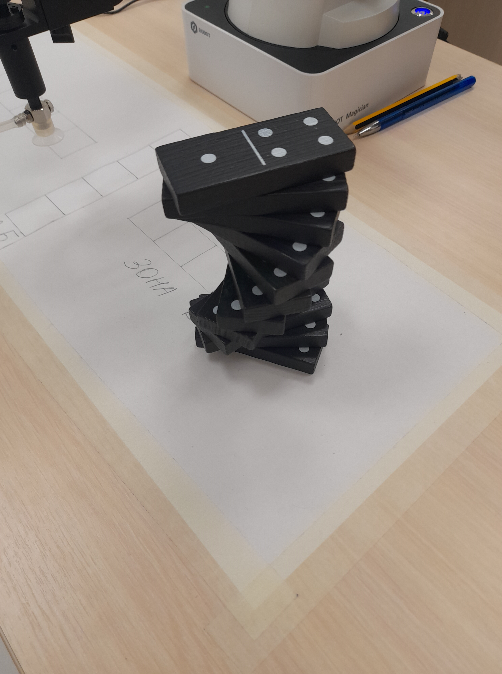
Рис.5 Винтовая лестница
При выполнении задания необходимо учесть, что костяшки домино должны иметь хотя бы одну гладкую поверхность для вакуумного захвата. Допускается выполнение данного задания пневматическим захватом при ширине костяшки не более 25 мм.
Перед выполнением задания рекомендуется объяснить учащимся понятия центра масс, сила тяжести; условие равновесия твердых тел, при котором конструкция будет устойчивой, а также на примерах объяснить, когда система тел находится в устойчивом равновесии (Пизанская башня, человек на стуле, раскачивающаяся лодка и т.д.). Предварительно следует учесть, что насадка поворачивается не на 3600, а на 3200. Поэтому если угол выйдет за пределы максимального, программа выпадет в ошибку.
На рисунке 4 представлен образец выполнения данной задачи учащимся с углом поворота 200.
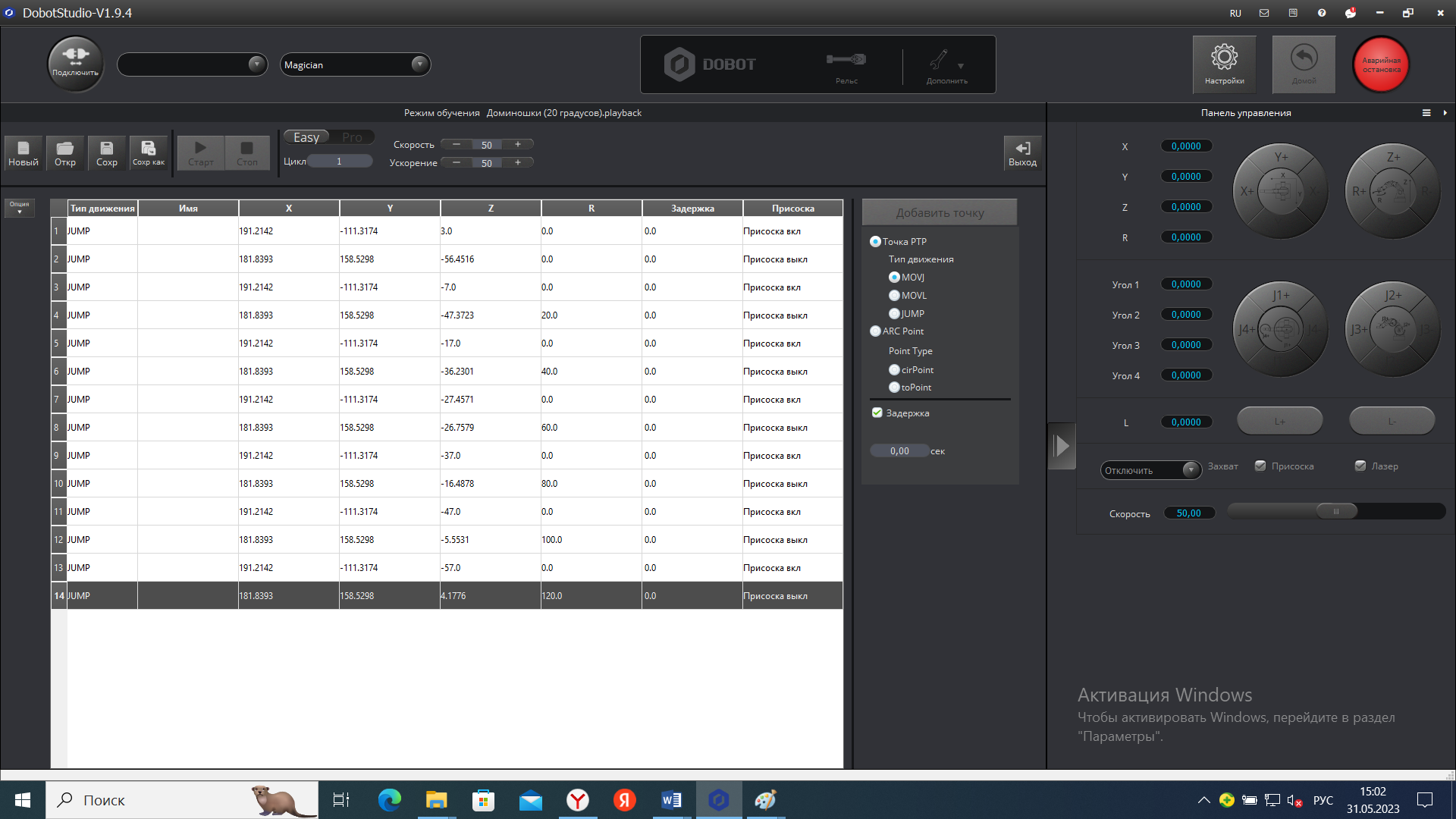
Рис. 6 Таблица для выполнения задания «Винтовая лестница»
- Программирование манипулятора в срeде COOGLE BROCKLY: DOBOT MAGICIAN: Образовательная инженерная платформа/ О.А. Горнов. – М.: Издательство «Экзамен», 2021. – 188[1] с.
- Dobot Magician. Руководство пользователя. — М.: ИНТ, 2018. — 114 с.
- Программирование манипулятора в среде PYTHON: DOBOT MAGICIAN: Образовательная инженерная платформа / О.А. Горнов.— М.: Издательство «Экзамен», 2021.— 120.
- Заяц А. В. Манипулятор Dobot Magician как средство профессионального самоопределения учащихся 5-8 классов // Научные высказывания. 2023. №7 (31). С. 26-28.
Научные высказывания #63