




Использование робота манипулятора Dobot Magician для изучения автоматизации процессов упаковки продукции
Рассмотрены преимущества использования роботов манипуляторов в упаковочных линиях. Приведена примерная программа переноса двумерного массива элементов в другой массив. Даны рекомендации по написанию программы.
Упаковка готовой продукции встречается почти на каждом производстве. На данный момент этим в основном занимается специально обученный персонал. Работники стоят у конвейера, по которому непрерывным потоком движется товар. Товар накапливается в накопителе, представляя собой определенную матрицу, элементами которой является отдельные единицы товара или упаковки товара. Дальше товар должен быть перемещен во вторичную тару (несколько элементов в 1 коробке) или на поддон. При этом зачастую конфигурация элементов (товара) в пространстве изменяется. Например, в накопителе товар располагался в виде матрицы 2×6, а разместить его необходимо в коробке в виде матрицы 3×4. Процесс однообразный, рутинный. Работники устают, совершают ошибки. К сожалению, без брака не обходится ни одна упаковочная линия. Поэтому автоматизация упаковки помогает решить данную проблему, а также снизить брак и потери.
Машины могут выполнять работу по упаковке продукции не останавливаясь: 24 часа в сутки, без выходных, праздников, перерывов на обед. За счёт увеличения производительности роботизация упаковки позволяет даже снижать цену на конечные товары.
Для автоматизации упаковки манипулятору требуется система технического зрения. Это позволяет с большой точностью обнаруживать продукцию на конвейерной ленте. Манипулятор укладывает продукцию в подготовленную тару.
Роботизированная упаковка позволяет обходиться без дополнительных погрузчиков. Один и тот же коллаборативный робот-упаковщик (кобот) может выполнять сортировку, вставку слоев, укладку на поддоны, упаковку в кейсы, опрокидывание.
Кроме того, коботам под силу осуществлять конечный контроль товаров на предмет дефектов упаковки и соответствию визуальным стандартам качества, наносить штрих-код на упаковку.
Преимущества роботов-упаковщиков
- Автоматизация упаковки заменяет ручной труд десятков, а на крупном производстве даже сотен людей, сокращая расходы предприятия на персонал, его содержание и обучение. Кроме того, повышается безопасность производства – при правильной настройке риск травмы даже при работе в непосредственной близости от человека стремится к нулю.
- Роботы-упаковщики могут обслуживать несколько конвейерных линий одновременно или выполнять различные задачи во время одного упаковочного цикла.
- Роботов легко перепрограммировать под другой тип, размер, форму упаковки или товара, а также под другие задачи (даже не связанные с упаковкой). При этом сотруднику предприятия не понадобятся специальные технические знания.
- Роботизированная упаковка характеризуется высокой точностью и отсутствием брака.
- Робот-упаковщик может синхронно работать с другими сборочными и упаковочными машинами, роботами-паллетайзерами, что обеспечивает непрерывность производственного процесса.
- Встроенная система технического зрения, позволяющая идентифицировать объекты укладки, определять их качество, координаты, цвет, форму, считывать штрих-код или QR-код, считывать камерой фактическое количество уложенных объектов, отправлять данные об упакованной продукции в базу данных предприятия.
- Возможность подключения дополнительных внешних камер технического зрения в места за пределы рабочей зоны кобота.
- Синхронизация со скоростью конвейера.
Роботизированная упаковка активно применяется в пищевой промышленности, фармацевтике, косметологии, производстве стройматериалов, на складах.
Робот Dobot Magician позволяет реализовать некоторые функции, моделирующие работу реальных роботов, участвующих в производственных процессах. Ниже представлен пример программы, реализующей некоторые функции робота упаковщика. Программа создана на Scratch.
Программа предназначена для перемещения физических блоков различного размера из одной точки в другую. Блоки могут быть расположены в виде одной матрицы и перемещены в виде другой. По своей сути программа выполняет транспонирование изначальной двумерной матрицы, состоящей из свободного количества элементов. Программа состоит из трёх основных блоков.
Блок 1
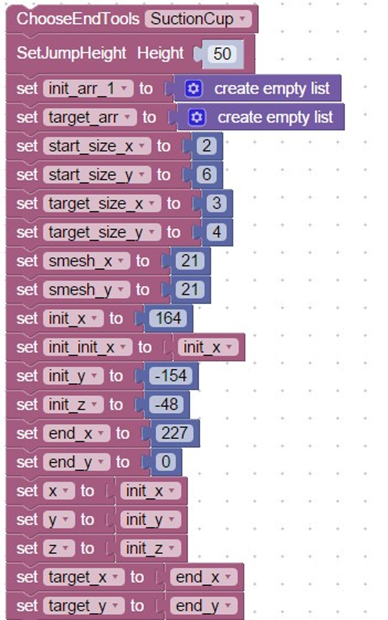
Первый блок программы представляет собой описание и создание всех переменных, которые нам потребуются для выполнения данной задачи.
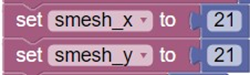
Выбираем насадку «Присоска» и настраиваем высоту перемещения манипулятора.
Данные две переменные отвечают за создание двух массивов, которые будут использоваться нами для сохранения изначальных и конечных координат каждого элемента матрицы.

Данные переменные нужны для указания размерности матриц, изначальной и конечной, т.е. указываем количество элементов по оси x и по оси y.
Данные переменные отвечают за смещение координат. Вычисляются они достаточно просто, нам просто нужно знать длину и ширину элемента (измеряется линейкой), а затем указать их в этих полях опираясь на оси.
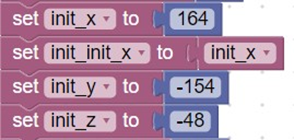
Данные переменные отвечают за начальное положение первого элемента в изначальной матрице и являются точкой отсчёта всех координат для изначальной матрицы. Определяются координаты вручную с помощью манипулятора.
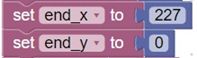
Данные переменные отвечают за положение первого элемента в конечной матрице. Определяются также с помощью манипулятора. Ось z не указывается т.к. если все элементы расположены на одной плоскости, то можно использовать координату из изначальных замеров.
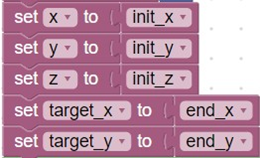
Данные переменные являются координатами в динамике, они нужны нам для того, чтобы не изменять изначальные координаты, поэтому в данном месте мы используем дублирующие переменные.
Блок 2
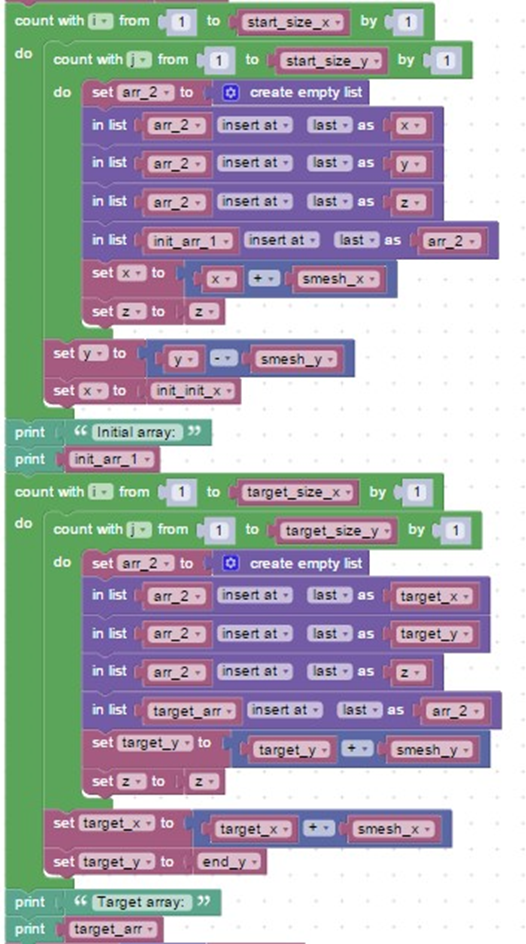
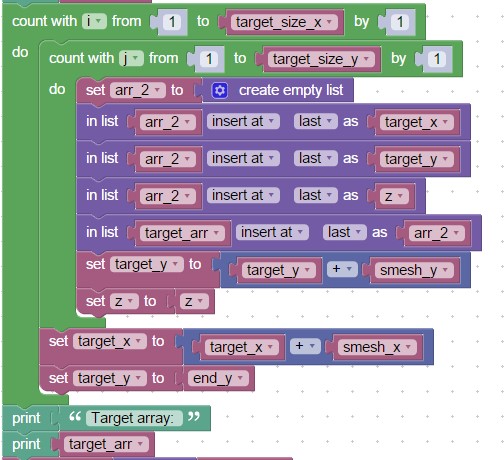
Второй блок нужен для создания двух массивов координат, изначального и конечного. Для того чтобы создать изначальный массив координат используются два цикла, один вложен в другой. Первый цикл идёт по элементам оси x, а вложенный в него идет по элементам оси y.


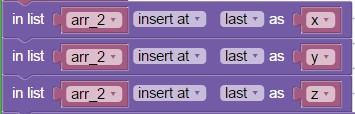
Во вложенном цикле создается пустой массив, он будет использоваться как подмассив координат одного элемента и записываться в основной массив.

Далее заполняется только что созданный массив значениями координат.
И после этого записывается в основной массив, заполненный координатами подмассив.

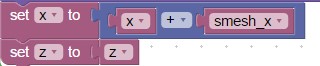
Затем во вложенном цикле задаём новое значение для координаты x, добавляем смещение на размер элемента.
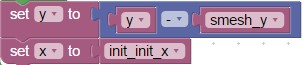
В основном цикле задаем новое значение для координаты y в соответствии со значением смещения, и устанавливаем значение координаты x равным изначальному значению.
После завершения работы основного цикла выводим весь изначальный массив в консоль, чтобы убедиться, что в процессе записи координат не возникло ошибок.

Конечный массив координат создаётся по той же схеме что и изначальный.
Блок 3

Третий блок реализует работу манипулятора, здесь перемещаются элементы из одной координаты в другую.
Данная переменная отвечает за то, сколько элементов есть в конечном массиве, именно столько раз отработает цикл по перемещению элементов.

Цикл для перемещения элементов матрицы, отрабатывает столько раз, сколько элементов находится в конечном массиве.

Сначала перемещаем манипулятор в координаты элемента изначального массива.

Координаты перемещения задаются с помощью обращения сначала в основной массив, а затем в подмассив с номером текущего элемента, далее по очереди обращаемся к каждой координате и записываем её в координаты для перемещения манипулятора.



После того как переместили манипулятор в нужную точку мы включаем «Присоску».

Далее перемещаем манипулятор на конечные координаты для данного элемента.

Координаты для перемещения манипулятора в конечную точку расположения текущего элемента задаются абсолютно таким же способом, как и при перемещении манипулятора в изначальную точку координат элемента.



После того как переместили элемент в конечную его точку, отключаем «Присоску».

После того как выполнится цикл по перемещению элементов мы выводим в консоль что программа завершила свою работу успешно.

- Программирование манипулятора в срeде COOGLE BROCKLY: DOBOT MAGICIAN: Образовательная инженерная платформа/ О.А. Горнов. – М.: Издательство «Экзамен», 2021. – 188[1] с.
- Dobot Magician. Руководство пользователя. — М.: ИНТ, 2018. — 114 с.
- Заяц А. В., Зубиков А. А., Заяц М. Л. Использование робота манипулятора Dobot Magician для изучения вложенных циклов с учащимися 8-9 классов // Научные высказывания. 2023. №20 (44). С. 34-37. URL: https://nvjournal.ru/article/Ispolzovanie_robota_manipuljatora_Dobot_Magician_dlja_izuchenija_vlozhennyh_tsiklov_s_uchaschimisja_8_9_klassov
- Заяц А. В., Зубиков А. А. Использование Dobot Magician для формирования инженерного мышления у учащихся 7-8 классов // Научные высказывания. 2023. №10 (34). С. 40-43. URL: https://nvjournal.ru/article/Ispolzovanie_Dobot_Magician_dlja_formirovanija_inzhenernogo_myshlenija_u_uchaschihsja_7_8_klassov






