




Система управления движением космической аппаратуры
В данной статье обозревается и рассматривается вопрос по модернизации и повышении автономности работы системы управления движением в космической аппаратуре. В статье освящены процессы системы управления движения, ее зависимость от наземного комплекса управления (человека), необходимости повышение живучести СУД и аналитическая модель и алгоритм реконфигурации системы.
Автор акцентирует внимание на том что со значительным увеличением производительности бортовых ЭВМ, активного применения микропроцессорных технологий в космической технике; значительной интеллектуализации бортовых алгоритмов управления. Следует передать большую часть функций управления КА из НКУ на бортовой комплекс управления, что может повысить автономность функционирования КА.
Данная статья может быть полезна начинающим специалистам в области инженерии космических аппаратур.
При разработке космических аппаратов одним из важных вопросов является обеспечение автономности и повышение живучести космической аппаратуры в экстремальных космических условиях.
Космическая Аппаратура (КА) наблюдения за поверхностью Земли – это техническое устройство, предназначенное для функционирования в космическом пространстве на низких (400-500 км) околоземной орбите, с целью наблюдения за поверхностью Земли.
Космический аппарат является классическим примером сложного объекта управления, состоящий из различных технических объектов, объединённых в подсистемы и системы со множеством различных типов датчиков, модулей, установок, которые тесно связаны между собой.
Бортовой комплекс управления космического аппарата представляет собой совокупность взаимосвязанных бортовых аппаратных средств и программно-математического обеспечения, предназначенных для решения задач управления КА совместно с наземным комплексом управления.
Для процесса управления КА характерно его деление на четыре вида (контура) управление бортовыми ресурсами, управление взаимодействием, управление бортовой аппаратурой и управление движением. При этом все виды управления взаимозависимы и обусловлены текущим состоянием объекта. Особо стоит отметить тесную взаимосвязь управления движением, управления бортовой аппаратурой и бортовым ресурсом в рамках СУД КА, а также влияние структурного управления на управление движением (координатно-параметрическое управление). Поэтому применительно к СУД КА реконфигурацию следует рассматривать не только как технологию управления структурой КА для парирования отказов ее элементов и подсистем (классическая реконфигурация), но и как технологию рационального перераспределение бортовых ресурсов с целью повышение надежности и живучести функционирования КА. При этом важными становятся задачи автоматического проведение реконфигурации КА средствами БКУ.
При совершенствовании и расширении применяемости космической техники, совершенствуются системы управления КА. На данный момент основным направлением развития системы управления КА являются:
- автоматизация процесса управления в составе НКУ;
- создание и развитие контура автономного управления КА в составе бортовой аппаратуры;
- увеличение срока активного существования КА;
Из вышеизложенного можно сделать вывод, что на данном этапе развития БКУ не в состоянии полностью обеспечить автономность управления КА без НКУ.
Однако увеличение одновременно находящихся КА на орбите, построение орбитальных группировок КА послужило к значительному снижению пропускной способности НКУ, что привело к второму пути развития БКУ (создание контура автономного управления КА) наиболее приоритетным. Начиная с 2000 г. существенно перераспределился объем задач, отвечающих за управление КА, между НКУ и БКУ в сторону бортового управления.
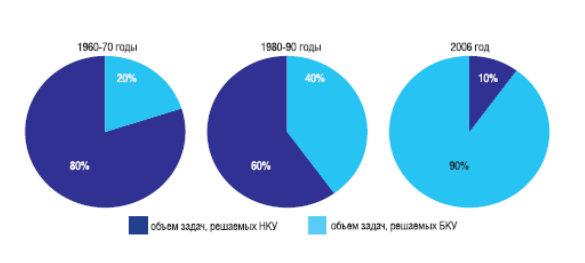
На данном рисунке представлена динамика изменений распределения объема задач управления КА между НКУ и БКУ за 50 лет развития космонавтики.
Система управления движения КА является составной частью БКУ КА. СУД КА – это программно-аппаратный комплекс, предназначенный для управления движением КА в космическом пространстве.
Движение КА в космическом пространстве рассматривается как движение в космическом пространстве его центра масс. При этом КА может совершать движение относительно своего центра масс, которое описывается значением трех углов: угол тангажа, крена и рысканья.
Управление движением центра масс КА осуществляется для решения задач:
- поддержания заданного орбитального положения КА;
- совершения маневров для изменения параметров орбиты;
- маневрирование в целях обеспечения требуемого качества работы целевой аппаратуры и т.д.
Управление движением вокруг центра масс осуществляется для решения задач:
- стабилизации КА;
- поворота одной из осей КА на заданный угол и его удержание
- гашение угловых скоростей КА и т. д.
Для выполнения задач СУД взаимодействует с другими системами КА – прежде всего с бортовой вычислительной системой, а также с системой спутниковой навигации и входящим в ее состав бортовым синхронизирующим координатно-временным устройством. Система электропитания питает СУД через специальный блок распределения питания, который входит в состав БКУ. Следовательно, СУД является составной частью БКУ и тесно связан с системами, входящими в состав бортовым комплексом управления.
Структурное состояние СУД - это совокупность технической и функциональной структуры СУД. Выполняемые КА функции напрямую зависят реализуемого режима ориентации, т.е. структурного состояния СУД. Всё множество состояний СУД делится на работоспособные, частично работоспособных и неработоспособные. каждому структурному состоянию СУД соответствует рабочая конфигурация БА в текущий режим ориентации. На борту КА возникают сбои и отказы бортовой аппаратуры из-за возмущающегося воздействия связанных с эксплуатацией КА в экстремальной космической среде. Сбои и отказы являются определяющими событиями для проведения реконфигурации БА СУД. После сбоя или отказа БА необходимо задать новую конфигурацию БА.
Для проведения реконфигурации СУД требуется описание структурной динамики на борту с учётом изменения технических состояний БА, а также с учётом возможности изменения режимов ориентации КА. Проведение реконфигурации СУД осложняется тем, что в процессе функционирования на борту КА происходит постоянное изменение информационного, временного, энергетического ресурса и характеристик его бортовой аппаратуры. Переключение режимов ориентации КА, ввод в строй резервной бортовой аппаратуры, вывод из строя неисправной аппаратуры, восстановление работоспособности КА, все эти события влияют на выполняемые КА функции и на выбор рабочей конфигурации БА СУД. Функционирование КА предполагает изменяющиеся во времени характеристики расхода/восполнения бортового ресурса и ограничения на информационное взаимодействие КА, а переход между режимами ориентации КА и изменение рабочей конфигурации БА – как реконфигурацию СУД. Как правило, проведение реконфигурации возлагается на НКУ. Однако при возникновении сбоев или отказов БА затрачивается значительное время на их идентификацию и принятие решения о смене рабочей конфигурации БА, что связано с перерывами в сеансах связи НКУ с КА. Принятие решения о смене конфигурации БА может являться следствием типового сбоя БА, а время, затрачиваемое на выработку этого решения, оказывается значительным из-за человеческого фактора (организации управления КА). К тому же при принятии решения может не учитываться состояние бортового ресурса, его экономное расходование. Если же реконфигурацию организовать на борту КА без привлечения НКУ, то это позволит принимать решения о смене конфигурации БА в автоматическом режиме, не дожидаясь вхождения КА в зону радиовидимости, а также снизит нагрузку на группу управления КА. Таким образом, выделим два типа сценария проведения реконфигурации: это реконфигурация посредством НКУ и автоматическая реконфигурация на борту КА.
Для формализации модели процесса реконфигурации СУД КА введем в рассмотрение следующие базисные множества:
𝐵 = {𝐵j, j = 1, … , 𝐽} – множество технических средств (ТСр) НКУ;
𝐶j = {𝐶j𝜆, 𝜆 = 1, … , 𝚲j} – множество каналов информационного взаимодействия j-го ТСр;
Φ = {Φ𝜋, 𝜋 = 1, … , 𝒫} – множество функций, реализуемых КА для выполнения основной целевой задачи;
𝑅 = {𝑅𝗌, 𝜀 = 1, … , E} – множество режимов ориентации КА;
Θ = {Θ𝑠, 𝑠 = 1, … , Z} – множество алгоритмов управления угловым движением, реализуемых СУД в бортовом программном обеспечении КА;
𝐷𝑒 = {𝐷𝑒𝑖, 𝑖 = 1, … , 𝑁} – множество бортовой аппаратуры КА;
𝑊 = {𝑊𝑘, 𝑘 = 1, … , 𝚿} – множество ресурсов КА, обеспечивающих работу его БА и функционирование в целом.
В соответствии с содержательной постановкой задачи реконфигурации СУД КА реализуются следующие функции: Φ1 – съёмка земной поверхности с помощью установленной целевой аппаратуры, Φ2 – передача массивов информации (целевой и телеметрической) на наземные средства, Φ3 – приём команд управления в зонах радиовидимости. Множество режимов ориентации КА включает в свой состав: 𝑅1 – штатный режим («точная» ориентация КА), 𝑅2 – режим с «грубой» ориентацией, 𝑅3 – неориентированный полёт КА. Режим ориентации КА определяет качество функционирования КА и выполняемые им функции. Соответствие реализуемых функций и режимов ориентации КА представлено в таблице 1.
Таблица 1
Соответствие режимов ориентации и функций КА
|
Функции КА, Φ |
Режимы ориентации КА, R |
||
|
𝑅1 |
𝑅2 |
𝑅3 |
|
|
Φ1 |
+ |
+ |
+ |
|
Φ2 |
+ |
+ |
- |
|
Φ3 |
+ |
- |
- |
Для формального описания структурной динамики при функционировании КА введём в рассмотрение системный динамический альтернативный мультиграф (ДАМГ) следующего вида
Где Х≡{1,2,3} индекс, характеризующий тип структуры контура управления КА.
 - описывает функциональную структуру контура управления угловым движением (СУД) КА и учитывает альтернативные варианты реализации режимов ориентации,
- описывает функциональную структуру контура управления угловым движением (СУД) КА и учитывает альтернативные варианты реализации режимов ориентации,  - множество вершин, отражающих алгоритмы управления угловым движением СУД при реализации режимов ориентации КА,
- множество вершин, отражающих алгоритмы управления угловым движением СУД при реализации режимов ориентации КА,  - множество дуг определяющих последовательность управления и взаимосвязь алгоритмов при реализации режимов ориентации КА;
- множество дуг определяющих последовательность управления и взаимосвязь алгоритмов при реализации режимов ориентации КА;
 – описывает техническую структуру СУД КА и учитывает альтернативные варианты рабочей конфигурации БА,
– описывает техническую структуру СУД КА и учитывает альтернативные варианты рабочей конфигурации БА,  – множество вершин, соответствующих БА СУД,
– множество вершин, соответствующих БА СУД,  – множество дуг отражает варианты взаимодействия БА СУД для реализации режимов ориентации КА;
– множество дуг отражает варианты взаимодействия БА СУД для реализации режимов ориентации КА;
 - описывает технологическую структуру управления КА и учитывает альтернативные варианты реализации функций КА,
- описывает технологическую структуру управления КА и учитывает альтернативные варианты реализации функций КА,  - множество вершин, отражающих функций
- множество вершин, отражающих функций  - множество дуг графа, отражающих логические и временную взаимосвязь между функциями КА;
- множество дуг графа, отражающих логические и временную взаимосвязь между функциями КА;
 - множество моментов времени, на котором можно выделить интервал проведения реконфигурации
- множество моментов времени, на котором можно выделить интервал проведения реконфигурации  .
.
Несмотря на то что с каждым годом космическая аппаратура становится все более автономной, полностью независимой от НКУ ее нельзя считать.
Несмотря на сложность процесса разработки, процесса автоматической реконфигурации СУД без помощи НКУ, бортовой комплекс управления все еще зависит от управления человеком с земли.
- Аванесов, Г.А. Алгоритм совместной обработки данных измерений звёздных координаторов и микроэлектромеханических датчиков угловой скорости / Г.А. Аванесов, Р.В. Бессонов, С.А. Дятлов, А.Н. Куркина, В.В. Сазонов // Механика, управление и информатика (ИКИ РАН). – 2011. – №2. – С. 36-48
- Аликин, Ю.И. Некоторые особенности создания космического аппарата «КОРОНАС-ФОТОН» / Ю.И. Аликин, М.П. Гассиева, А.Р. Гуткин, В.Г. Кравец, Р.С. Салихов // Механика, управление и информатика. – 2010. – №3. – C. 8-26
- Архангельский, А.Я. Программирование в C++ Builder 6/ А.Я. Архангельский. – М.: «Издательство БИНОМ», 2003. – 1152 с.
- Ахметов, Р.Н. Концепция автономного управления живучестью автоматических космических аппаратов дистанционного зондирования Земли в аномальных ситуациях / Р.Н. Ахметов, В.П. Макаров, А.В. Соллогуб // Известия самарского научного центра РАН. – 2009. – №3-1, т.11. – C. 165-176
- Ахметов, Р.Н. Методы и модели автономного управления живучестью автоматических космических аппаратов дистанционного зондирования Земли / Р.Н. Ахметов // Вестник самарского государственного аэрокосмического университета им. академика С.П. Королёва, Самара, СГАУ. – 2008. – №2(15) . – C. 194-210
- Ахметов, Р.Н. Принципы управления космическими аппаратами мониторинга Земли в аномальных ситуациях / Р.Н. Ахметов, В.П. Макаров, А.В. Соллогуб // Информационно-управляющие системы. – 2012. – №1. – С. 16-22
Научные высказывания #99







