




Разработка солнечного трекера
Приведены результаты разработки солнечного трекера. Обсуждаются основные показатели эффективности принятых решений. В качестве иллюстраций представлены фрагменты конструкторской и технологической документации.
Современная экологическая обстановка и прогнозы истощения привычных ресурсов требуют поиска эффективной реализации альтернативных, более безопасных, возобновляемых источников энергии. Солнце – главный источник энергии для Земли, в целом генерирующий ее в тысячи раз больше общемирового потребления человечества. И солнечная энергетика – отрасль альтернативной энергетики, направленная именно на использование прямого солнечного излучения для генерации тепловой или электрической энергии. Солнечные трекеры разработаны и предназначены для увеличения эффективности улавливания солнечными панелями прямого излучения. Ведь панели лучше всего работают только при поддержании перпендикулярного положения панели приемника относительно вектора падения лучей.
Для повышения точности и большей эффективности координации используется двуосный трекер, который наиболее эффективен в средних широтах (см. рисунок 1).
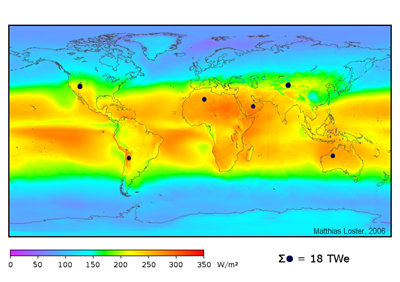
Рисунок 1. Карта солнечного излучения на поверхности Земли
Из рисунка 1 видно, что экваториальные и тропические широты получают огромное количество солнечной энергии. С учетом максимальной эффективной выработки самих батарей и относительной статичности солнца в направлении юг-север для этих мест подойдут самые простые трекеры, базирующиеся на одной оси вращения. И, следовательно, чем ближе положение солнечных батарей к полюсам, тем ниже эффективность одноосевой системы и выше потребность в добавлении второй оси вращения.
Поскольку интенсивность солнечного излучения максимальна при перпендикулярном положении поверхности приемника к источнику излучения, необходимо применение поворотного устройства, отслеживающего и/или рассчитывающего положение солнца на небе в любой сезон и время суток в любых географических координатах. Наиболее простой метод отслеживания солнца без критичной потери в эффективности из-за различных помех можно достичь благодаря фотоэлементам, расположенным на плоскости поверхности панелей. Структурная и принципиальная схемы устройства представлены на рисунках 2 и 3, соответственно.

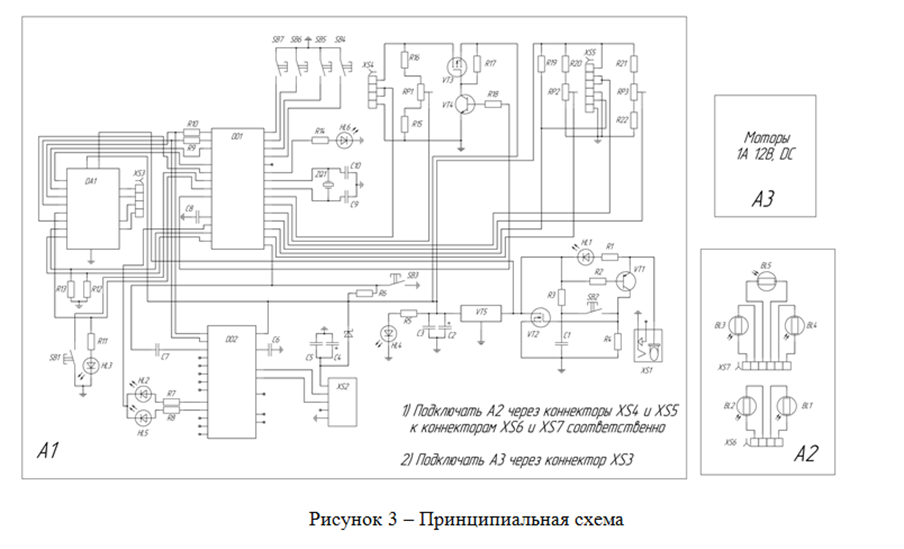
Важно отметить, что все устройство питается отдельным блоком питания, который в свою очередь будет отдельным покупным изделием. Следовательно, при проектировании схемы электрической принципиальной нужно учитывать характеристики основного микроконтроллера и драйвера двигателя, по которым уже будут выбираться характеристики для блока питания.
Выбранному микроконтроллеру подходит напряжение 5В, а драйвер двигателя требует, как 5В, так и 12В. Используя регулятор напряжения, можно получить две линии питания, способные обеспечить энергией все устройство.
Блок питания будет подключаться к коннектору XS1, благодаря узлу, состоящему из транзисторов VT1 и VT2, а подачу питания можно контролировать с помощью тактовой кнопки SB2 и отслеживать с помощью светодиода. Регулятор напряжения VT5 разделяет цепь питания на две независимые линии 5В и 12В. Для стабилизации и фильтрации используется параллельно подключенные конденсаторы. Для защиты USB модуля и подключённого компьютера в качестве фильтра для цепи на 5В используется диод VD1.
Основой всего устройства является микроконтроллер DD1. Вся информация из источников сигналов и регуляторов обрабатывается в нем. Для увеличения его производительности используется внешний генератор частоты, реализованный на кварцевом резонаторе ZQ1.
Микроконтроллер DD2 обеспечивает связь и настройку устройства с компьютером через USB-порт XS2. Для идентификации работы модуля служат два светодиода.
Драйвер двигателя DA1 связывает электрическую и механическую части устройства. Он управляет модулем электродвигателей, который в свою очередь являются отдельным покупным изделием, состоящим из моторов с характеристиками 12В, DC, 1А, и подключается через коннектор XS3.
Резисторы R12 и R13 защищают всю систему от перегрузки, и чтобы ток не превышал 1А используется заземление.
Источниками сигналов для солнечного трекера являются светорезисторы BL1-BL5, расположенные на отдельном печатном узле, который подключается к основному устройству через два коннектора XS4 и XS5.
Кнопки SB4-SB7 являются частью ручной регулировки положения панелей. Через их нажатие генерируются сигналы, которые считываются микроконтроллером для обеспечения прямого управления моторным узлом. Служебная кнопка «RESET» SB3 необходима для перезагрузки и последующей перенастройки всего устройства. Посредством замыкания SB1 отключается автоматический модуль возврата.
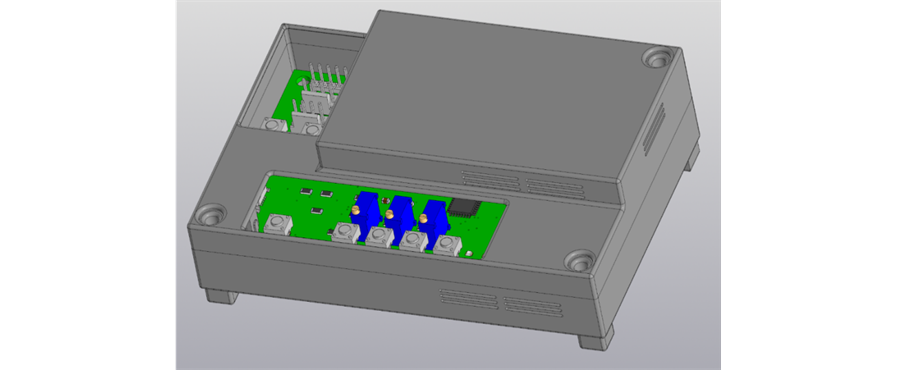
Рисунок 4. Модель основного блока А1а
На рисунке 4 представлена Модель основного блока А1. Модернизированная конструкция двуосного солнечного трекера представляет собой устройство с блочным разделением и с выводом фотоэлементов за пределы основной системы. Подобное решение способствует снижению риска поломки или ущерба основного оборудования из-за непогоды или вибраций, ведь главный более дорогостоящий расчетный блок А1 находится под панелями, защищающими его от града или дождя, и практически неподвижен. Но при этом выводные дешевые фотоэлементы находятся в ударопрочном корпусе, и несмотря на относительно повышенные риски поломки, вряд ли выйдут из строя. А если подобное случится, то легкозаменяемая элементная база не принесет фактически никаких убытков.
Добавление в схему программируемого микроконтроллера на базе atmega позволяет грамотно настроить режимы работы и существенно снизить энергопотребление солнечного трекинга, получая прибавку к генерации энергии солнечных панелей с учетом потребления расчетных и двигательных блоков самого трекера. При необходимости можно еще больше увеличить интервал простоя между рабочими режимами, в соответствии со скоростью движения солнца по небу. На рисунке 5 представлена Модель блока выводных фотоэлементов А2.
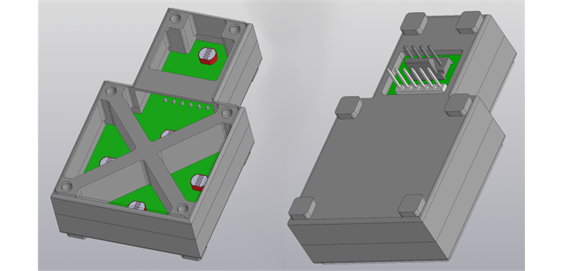
Рисунок 5. Модель блока выводных фотоэлементов А2
Для проверки работоспособности конструкции был проведен тепловой анализ изделия в САПРе SolidWorks Flow Simulation, рассчитаны вибпропрочностные и надежностные характеристики. На рисунке 6 представлена тепловая модель устройства.
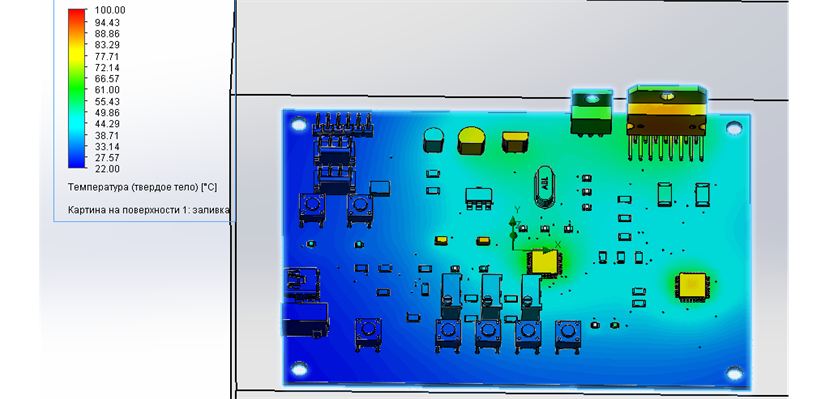
Рисунок 6. Тепловая модель устройства
Драйвер двигателя и полупроводниковые приборы нагреваются сильнее остальных ЭРЭ. Максимальная точечная температура на самом горячем элементе составляет +83℃. Допустимая рабочая температура на этом и других элементах не была превышена, значит устройство не выйдет из строя и сохранит свою работоспособность. Поэтому нет необходимости в установке активной системы охлаждения.
Масса компонентов на ПП составляет 29.1 грамм. Характеристики ПП
- Габариты – 117х80х1.6 [мм]
- Материал – стеклотекстолит фольгированный
- Коэффициенты – модуль упругости Е = 329*109, Пуассон ε = 0.26, предел прочности σ = 1*107, плотность ρ = 3980
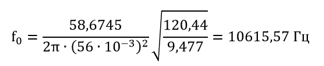 (1)
(1)
Рассчитанная частота резонанса устройства равная 10 кГц выходит далеко за пределы рамок рабочего диапазона 10-200 Гц. Это значит, что риск механического резонанса отсутствует и плата виброустойчива при эксплуатации по требованиям технического задания.
Надежностные характеристики рассчитаны с учетом средней интенсивности отказов элементов, коэффициента нагрузки и поправочным коэффициентом. В результате были получены данные, по которым средняя наработка на отказ находится в районе 340 000 ч, а вероятность безотказной работы на 9000 ч составляет 0.9744. Это значит, что солнечный трекер полностью соответствует требованиям технического задания.
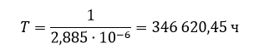 (2)
(2)
 (3)
(3)
В заключении следует отметить, что разработанная конструкция двуосного солнечного трекера работоспособна, надежна и удобна в использовании, поскольку имеет небольшие масса-габаритные параметры, имеет эффективное разделение блоков с простым доступом к ним и является недорогим в производстве устройством, ориентированным на массового потребителя.
- Грачев А.А., Мельник А.А., Панов Л.И. Конструирование электронной аппаратуры на основе поверхностного монтажа компонентов. – М.: НТ Пресс, 2006. – 384 с.
- Медведев А.М. Технология производства печатных плат. – М.: Техносфера, 2005. – 360 с.
Научные высказывания #99







