




Планетарно-кривошипно-ползунный механизм
В статье рассмотрен планетарно-кривошипно-ползунный механизм, его принцип работы. По заданной кинематической схеме была построена модель планетарно-кривошипно-ползунного механизма с помощью деталей машин. Поэтапно рассмотрены взаимодействия звеньев механизма между собой.

Введение
Моделирование и визуализация планетарно-кривошипно-ползунного механизма являются важными аспектами проектирования и анализа механизмов, используемых в различных отраслях промышленности, таких как машиностроение, авиация и космонавтика. Механизм состоит из двух кривошипов, соединенных между собой камнем, который перемещается по направляющей. Кривошипы могут быть соединены с валом двигателя или другим источником движения, а камень может использоваться для передачи движения на другие элементы механизма. Моделирование и визуализация позволяют студентам оценить работу механизма, выявить возможные проблемы и оптимизировать его конструкцию для достижения максимальной эффективности и надежности. В этом контексте, были рассмотрены основные принципы моделирования и визуализации планетарно-кривошипно-ползунных механизмов, а также рассмотрим некоторые примеры использования этих методов в реальных проектах[1,с.117-120].
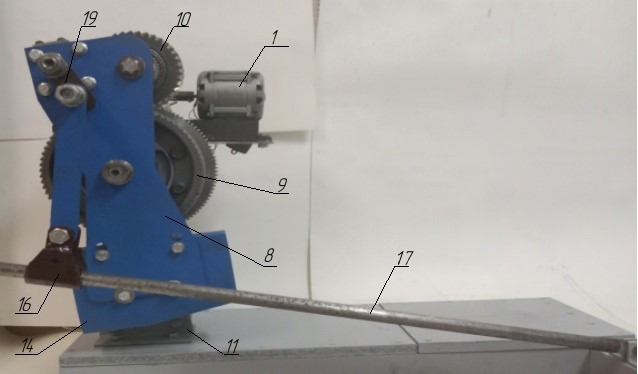
Рис. 1.Главный вид
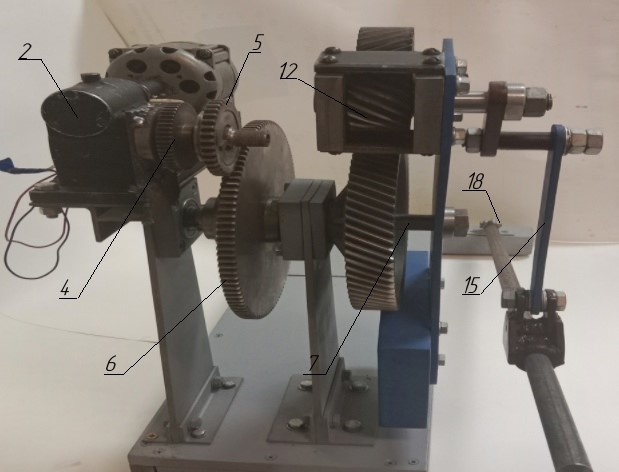
Рис. 2. Вид сбоку
Привод механизма осуществляется электродвигателем 1. Мощностью 25 Вт и частотой вращения 1350 оборотов в минуту. От электродвигателя крутящий момент передается червячному редуктору (2), передаточное число которого составляет 1:36[2]. Далее крутящийся момент преобразуется с помощью прямозубых шестерней наружного зацепления, от шестерни (3) с 27 зубьями, установленной на тихоходном валу червячного редуктора к шестерни (4) с 49 зубьями, находящиеся на промежуточном валу[3]. На этом же промежуточном валу располагается шестерня (5) с 36 зубьями, которая входит в зацепление с зубчатым колесом (6) с 110 зубьями. Зубчатое колесо в свою очередь располагается на валу (7), который приводит в движение механизм. Все шестерни запрессованы на валы со шпоночными пазами, вращение валов осуществляется радиальные шарикоподшипники.
В результате суммарное передаточное число составляет 1:200. Вал (7) осуществляет 6,75 оборотов в минуту, мощность на валу равна 5 кВт.

Рис. 3. Схема привода вращения механизм
Механизм представляет собой планетарный и кривошипно-ползунный механизм, собранный воедино[4]. Планетарная часть механизма представляет собой водило (8), закрепленное на приводном валу (7) через шпонку. К водиле крепится через 2 роликовыхрадиально-упорных подшипника сателлит (10) , представляющий собой косозубую шестерню с 37 зубьями. Сателлит (10) входит в зацепление с опорным колесом (9), жестко зафиксированный на стойке (11). Само опорное колесо представляет собой косозубое зубчатое колесо с 70 зубьями. Также сателлит (10) входит в зацепление с косозубой шестерней (12), с 16 зубьями.
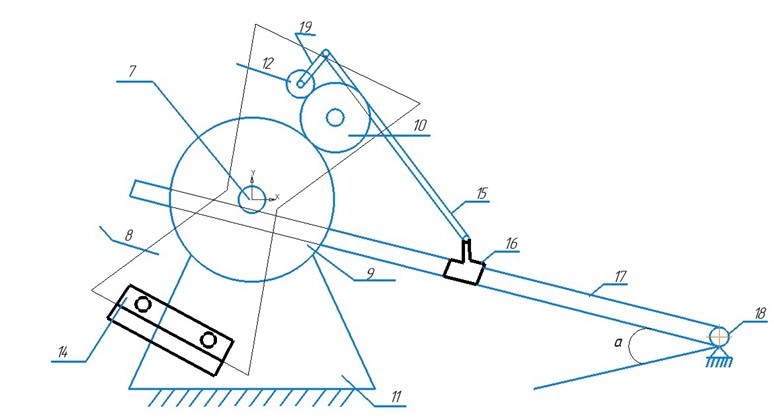
Рис. 4. Схема механизма
За 1 оборот водила (8) и шестерня (12) 4,375 оборотов. Для уравновешивания водила установлен противовес (14), равный по массе шестерням (10) и (12) с учетом подшипников и обойм для них. Итоговая масса противовеса составляет 6,5 килограмм.
Кривошипно-ползунная часть механизма представляет собой кривошип (14), который жестко закреплен на валу с шестерней (12) (Рис. 2.). Длина кривошипа составляет 52 миллиметра. К кривошипу через подвижную ось крепится шатун (15), длиной 182 миллиметра. К шатуну также через подвижную ось крепится камень (16). Камень двигается по направляющей кулисе (17), край которой зафиксирован к основанию через опору (18)[5].
В результате работы механизма камень перемещается по кулисе, сама же направляющая двигается сначала вверх, а потом вниз, совершая тем самым вращательное движение на угол α=57 °.
Соединение звеньев (17) и (18) представляет собой низшую кинематическую пару 1В (одноподвижная вращательная пара).
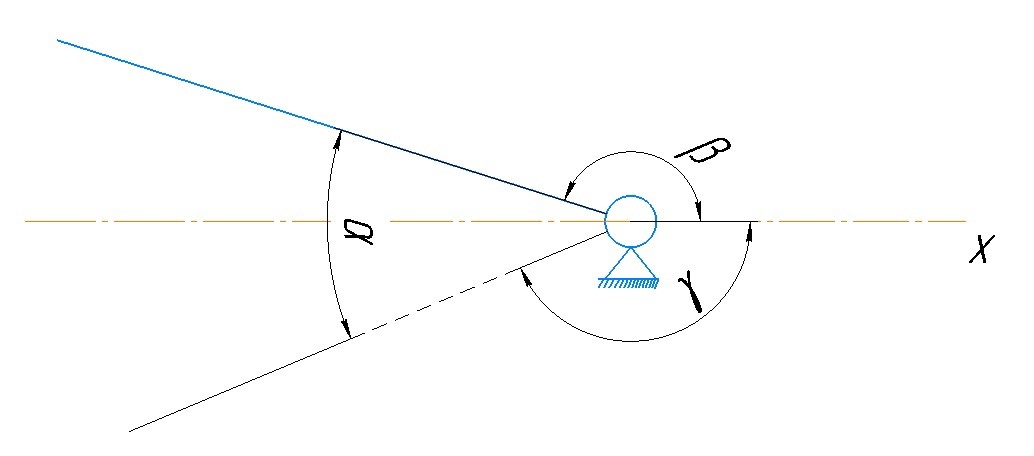
Рис. 5. Схема кинематической пары 1В
β – это угол между крайним верхним положении кулисы и осевой прямой x, а γ – угол между крайним нижним положением кулисы и осевой промой x.
Составим систему уравнений:

Заключение
Наша работа в рамках исследовательского проекта позволяет сделать вывод о том,что моделирование и визуализация планетарно-кривошипно-ползунного механизма является важным инструментом для проектирования и анализа механизмов. Это позволяет инженерам и конструкторам точно представлять, как будет работать механизм в реальных условиях эксплуатации, и вносить необходимые изменения для улучшения его производительности и надежности. Кроме того, визуализация механизма в различных режимах работы может помочь в понимании его поведения и определении возможных проблем и неисправностей. В целом, моделирование и визуализация являются необходимыми инструментами для создания эффективных и надежных механизмов.
- Артоболевский, И.И. Теория механизмов и машин. / И.И. Артоболевский. - М.: Альянс, 2016. - 640 c.
- Мкртычев, О.В. Теория механизмов и машин: Учебное пособие / О.В. Мкртычев. - М.: Вузовский учебник, 2019. - 320 c.
- Литвин Ф.Л., Теория зубчатых зацеплений// Издательство “Наука” Главная редакция физико-математической литературы Москва, 1968. – 584 с.
- Кудрявцева В.Н., Ю.Н. Кирдяшева, Планетарные передачи: Cправочник//Под редакцией докторов тех. наук Кудрявцева В.Н. и Ю.Н. Кирдяшева Ленинград, 1977. – 536 с.
- Фролов К. В., С. А. Попов, Мусатов А. К. и др., Теория механизмов и машин: Учебник для вузов// Издательство Высшая школа, 1987. – 496 с.
Научные высказывания #99







