




Кривошипно-ползунный механизм с двумя шатунами
Исследование фокусируется на изучении кривошипно-ползунного механизма как метода трансформации вращательного движения в возвратно-поступательное. В работе предоставлены определения вращательного и поступательного движения, осуществлены математические расчеты, и построен график изменения скорости камня. Этот научный труд включает в себя теоретические концепции, анализ результатов экспериментов, выводы, диаграммы и ссылки на авторитетные источники, что подчеркивает его значимость и научную актуальность.

Преобразование вращательного движения в возвратно - поступательное
Вращательное движение представляет собой уникальный тип движения тела, где все его точки совершают вращательные движения вокруг одной точки с одинаковой угловой скоростью в едином направлении. Этот вид движения находит широкое применение в различных областях науки и техники, привлекая внимание, например, при запуске двигателей внутреннего сгорания (ДВС) [1].
Поступательное движение, в свою очередь, описывает движение тела, где его точки следуют по прямой линии, перемещаясь с постоянной скоростью. Это движение подчинено законам классической механики и находит применение в разнообразных сферах науки и техники, будь то движение автомобиля по дороге или передвижение поезда по рельсам.
Существует несколько методов преобразования вращательного движения в возвратно-поступательное, и одним из них является использование криво-шипно-ползунных механизмов. Примером такого механизма может служить устройство классического двигателя внутреннего сгорания (ДВС) [2]. Кривошипно-ползунный механизм включает в себя несколько ключевых компонентов: кривошип, шатуны, камень и кулиса, которые совместно обеспечивают эффективное преобразование движения и служат основой для работы подобных устройств.
Рассмотрим рисунок 1, на котором изображен кривошипно-ползунный механизм с двумя шатуна.
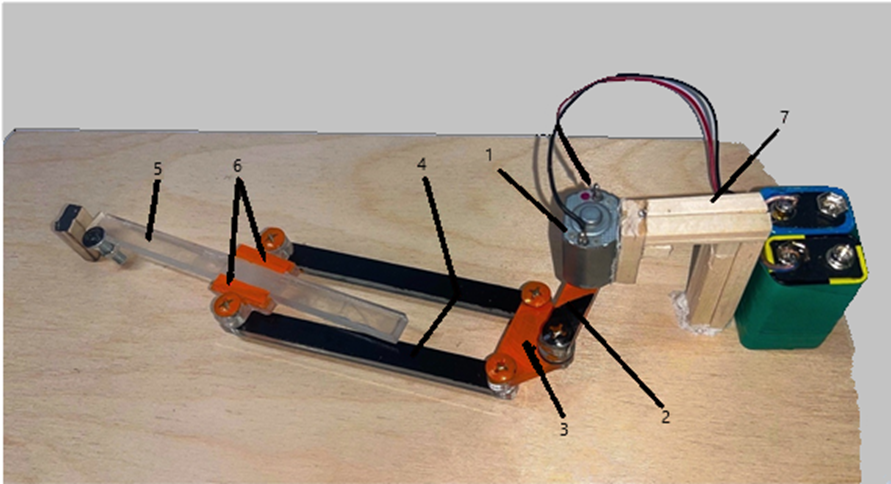
Рисунок 1. Кривошипно-шатунный механизм с двумя шатунами
1- электродвигатель; 2- кривошип; 3- шатун; 4- шатуны;
5- кулиса; 6 – камень; 7- стойка
Принцип работы
Кривошипно-шатунный механизм с двумя шатунами работает при помощи вращения вала электродвигателя 1 передавая вращение кривошипу 2 который в свою очередь вращает шатун 3 и два шатуна 4, к которым закреплен камень 6. Камень 6 ходит по направляющей кулисы 5. Механизм закреплен на стойке 7.
Устройство механизма
В данном механизме используется коллекторный электродвигатель постоянного тока FF-130 мощностью 0.73 Вт и номинальным напряжением в 9 В. Скорость вращения вала составляет 7300 об/мин на холостом ходу.
В данной конструкции используется на два шатуна больше, чем в
классическом кривошипно-шатуном механизме. Благодаря этому снижается вероятность смещения камня, за счет симметричного осевого приложения сил.
Область применения
Данный механизм может применяться во всех сферах, где применяется классический кривошипно-ползунный механизм, например: роторные тату- машинки, ДВС работающие по циклу Отто, Аткинсона, Миллера и им подобные. Данная универсальность делает механизм перспективным и востребованным в различных технических приложениях. [3].
Экспериментальная часть
Исходные данные:
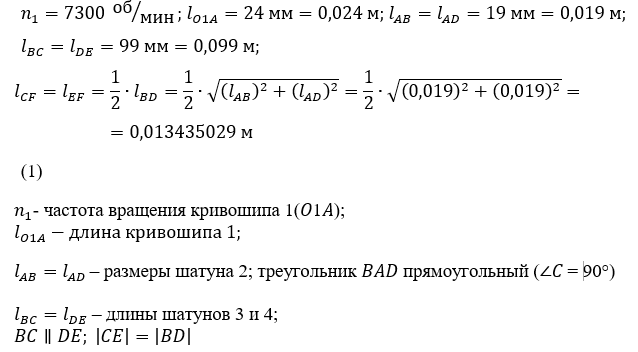
(1) – по теореме Пифагора.
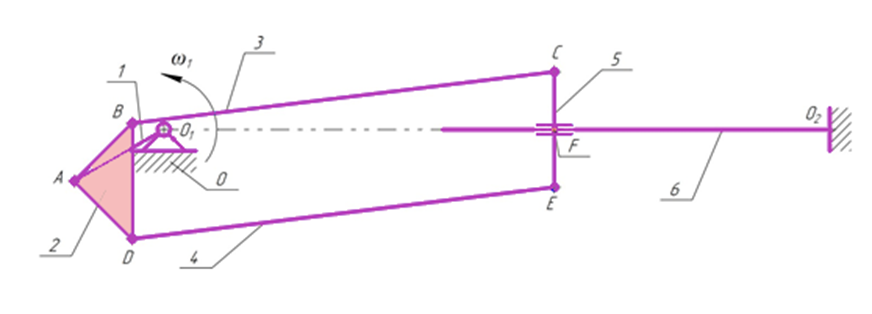
Рисунок 2. Схема механизма в произвольном положении.
Кулису 6 расположим горизонтально, сделав ее неподвижной. Если кулису 6 сделать подвижной (например, расположив в точке O2 шарнирную неподвижную опору), то полученный механизм по формуле Чебышева будет иметь две степени свободы, соответственно однозначное положение механизма не будет определяться положением кривошипа 1 [4].
В таком виде рисунок 2 механизм имеет 1 степень свободы.
Число подвижных звеньев:n=5(1,2,3,4,5); стойка 0 и кулиса 6 – неподвижны;
Число одно подвижных кинематических пар 5 класса:p5=7; вращательные - O1, A, B, C, D, E; поступательная – F;
Число двухподвижных кинематических пар 4 класса: p4=0.
По формуле Чебышева:

Нам необходимо построить график линейной скорости в точке F (геометрический центр камня 5).
Решение.
Построение кинематических диаграмм (перемещения и скорости т.F) [5].
- Для начала построим план положений механизма (12 положений).
Принимаем масштабный коэффициент длин  .
.
За начальное положение (положение 0) принимаем крайнее левое положение (по положению камня 5) механизма O1A0B0D0C0F0E0O2. При этом кривошип 1 и кулиса 6 находятся на одной горизонтальной линии и  .
.
Положение 0 выделено основной линией.
Примем направление вращения кривошипа 1 против хода часовой стрелки.
Далее используя метод засечек, строим оставшиеся 11 положений механизма, поворачивая каждый раз кривошип 1 на угол φ1=30° в сторону вращения.
Положение 6 (O1A6B6D6C6F6E6O2) является крайним правым положением механизма (по положению камня 5). В этом положении кривошип 1 и кулиса 6 также находятся на одной горизонтальной линии, но  .
.
Также на плане укажем ход камня кулисы 5 - h5. Измеряем на плане:
Реальный ход камня:
 .
.
Очевидно, что 
План положений механизма показан на рисунке 3.
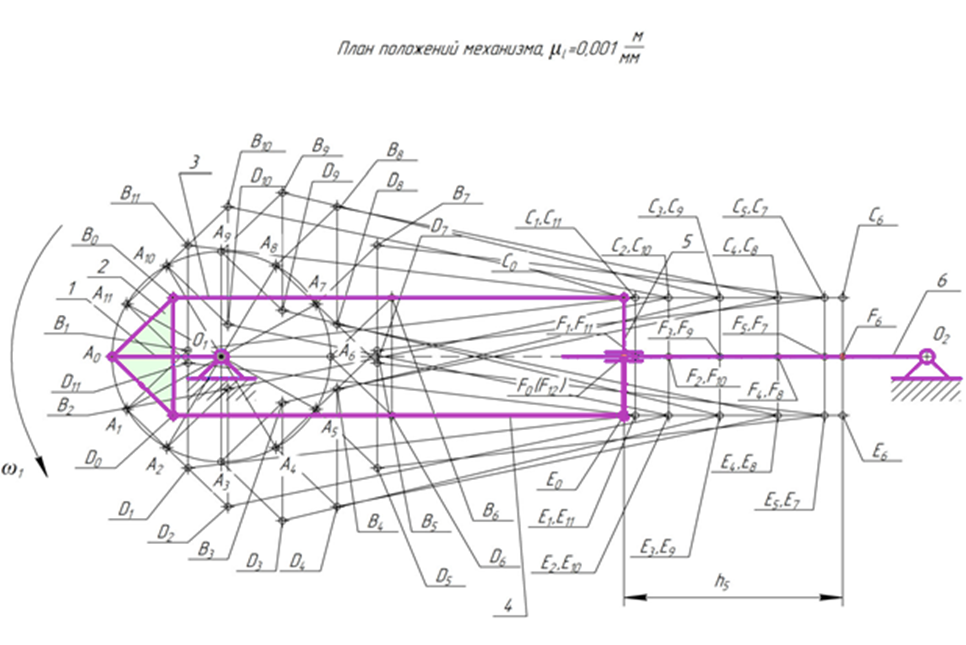
Рисунок 3. План положений механизма
- Теперь построим диаграмму перемещений камня кулисы 5 (точка F)
Строим диаграмму перемещений т. F в зависимости от угла поворота кривошипа 1.
По оси абсцисс откладываем отрезок x=180 мм, который делим на двенадцать частей.
Для диаграммы перемещений принимаем масштабные коэффициенты:
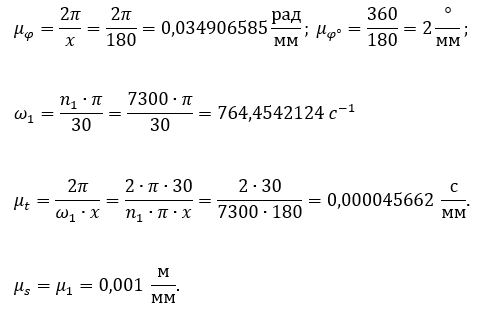
μ𝜑, μ𝜑° – масштабный коэффициент угла поворота кривошипа 1( 𝜑);
ω1- угловая скорость кривошипа 1;
μt- масштабный коэффициент времени;
μs- масштабный коэффициент перемещения т. 𝐹.
По оси ординат в соответствии с масштабом откладываем перемещение точки F в зависимости от положения механизма.
Диаграмма перемещений камня (т. 𝐹) показана на рисунке 4.
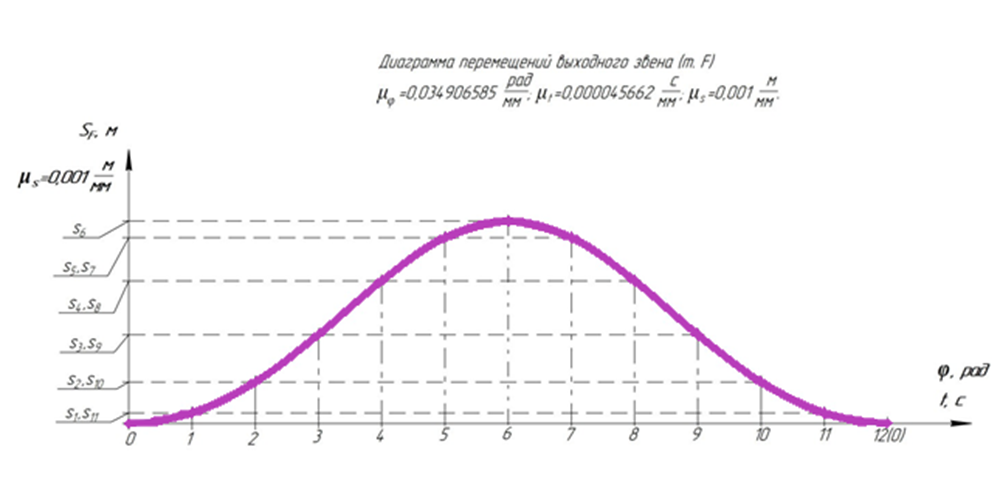
Рисунок 4. Диаграмма перемещений т.𝐹.
- Построение диаграммы скоростей (график скорости) выходного звена осуществляем графическим дифференцированием (методом хорд) диаграммы перемещений [6].
Масштабный коэффициент скорости:

Диаграмма скоростей показана на рисунке 5.
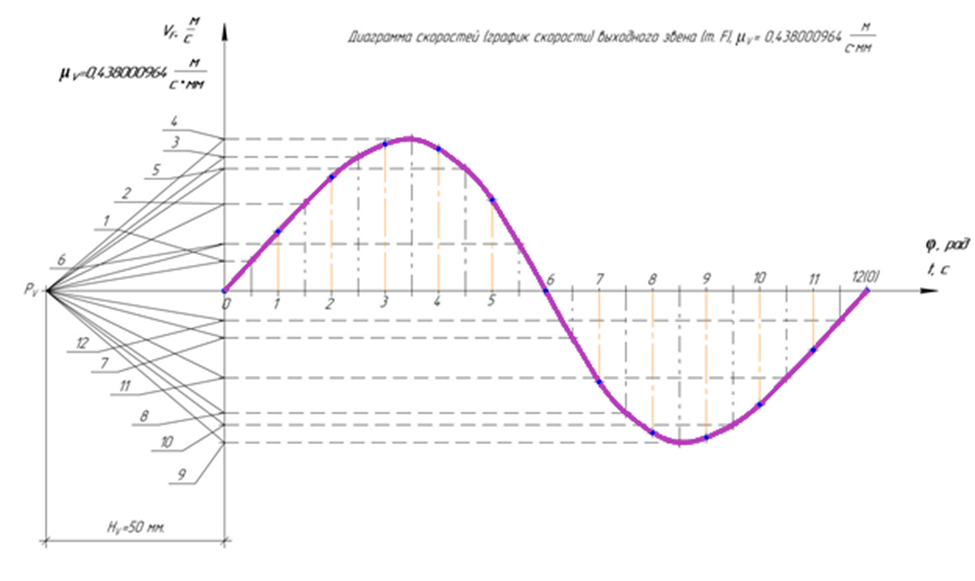
Рисунок 5. Диаграмма скоростей выходного звена
𝜑- угол поворота кривошипа 1;
𝑡 – время;
𝑉𝐹 - скорость камня кулисы (т. F).
По графику скорости мы можем определить скорость точки F (камня 5) при всех положениях механизма (в момент времени).
Таким образом, была рассчитана скорость выходного звена для кривошипно-ползунного механизма и построен график. Уникальность данных расчетов позволяет быстро и точно рассчитывать подобные задачи.
- Теория механизмов, машин и манипуляторов: учеб.-метод. комплекс. В 2 ч. Ч. 1. Организационные основы курсового проектирования технологических машин / В. Ф. Коренский. – Новополоцк: ПГУ, 2008. – 62 с
- Кривошипно-ползунный механизм рабочей машины. Структурный анализ кривошипно-ползунного механизма ТММ // edukr.ru [Электронный ресурс] URL: https://edukr.ru/
- Теория механизмов и механика машин: учеб. для вузов, под ред. Фролова К.В.М.: Высш. шк. 1998. 496 с
- Левитская О.Н., Левитский Н.И., Курс теории механизмов и машин: Учеб. пособие для мех. спец. Вузов.-2-е изд., перераб. и доп.- М.: Высш. шк., 1985.-279 с., ил.
- Артоболевский И.И. Теория механизмов и машин: учебник для студентов ВТУЗов/ И.И. Артоболевский – Изд.4-е, перераб. и доп. – Москва. Наука. Главная редакция физико-математической литературы; 1986. - 639 с.
- Попов С. А. Курсовое проектирование по теории механизмов и машин С. А. Попов, Т. А. Тимофеев. М.: Высш. шк., 1998. 351 с.
Научные высказывания #99







